- English
- Español
- Português
- русский
- Français
- 日本語
- Deutsch
- tiếng Việt
- Italiano
- Nederlands
- ภาษาไทย
- Polski
- 한국어
- Svenska
- magyar
- Malay
- বাংলা ভাষার
- Dansk
- Suomi
- हिन्दी
- Pilipino
- Türkçe
- Gaeilge
- العربية
- Indonesia
- Norsk
- تمل
- český
- ελληνικά
- український
- Javanese
- فارسی
- தமிழ்
- తెలుగు
- नेपाली
- Burmese
- български
- ລາວ
- Latine
- Қазақша
- Euskal
- Azərbaycan
- Slovenský jazyk
- Македонски
- Lietuvos
- Eesti Keel
- Română
- Slovenski
- मराठी
- Srpski језик

ບ້ານ
>
ຜະລິດຕະພັນ > Closed Loop Stepper Motor > 3 Phase Closed Loop Stepper Motor > 57 Series 3 Phase Nema23 Closed Loop Stepper Motor
ຜະລິດຕະພັນ
- AC Servo Motor
- DC Servo Motor
- Closed Loop Stepper Motor
- Hybird Stepper Motor
- Hybird Stepper Motor Driver
- Closed Loop Stepper Motor Driver
- AC Servo Motor Driver
- ມໍເຕີ Stepper ປະສົມປະສານ
- DC Servo Motor Driver
- Screw Motor
- RS485 ຫຼື CAN ຫຼື Ethercat Bus ປະເພດ Stepper Driver
- ເຄື່ອງຫຼຸດດາວເຄາະ
- PLC ຄວບຄຸມ
- ໜ້າຈໍສຳຜັດ HMI
- ຊຸດຄົນຂັບລົດຈັກດ້ານ motv
- ຊຸດເຄື່ອງຂັບຂີ່ມໍເຕີ້ມໍເຕີ A8 AC Servo
- ມໍເຕີ Servo ປະສົມປະສານ
ຜະລິດຕະພັນໃຫມ່
 Lichuan AC Servo Motor Drivers Kit HIGH POWER 235N.m 37KW AC380V 73A 1500/2000RPM IP65
Lichuan AC Servo Motor Drivers Kit HIGH POWER 235N.m 37KW AC380V 73A 1500/2000RPM IP65 Lichuan AC Servo Motor Drivers Kit HIGH POWER 191N.m 30KW AC380V 52A 1500/2000RPM IP65
Lichuan AC Servo Motor Drivers Kit HIGH POWER 191N.m 30KW AC380V 52A 1500/2000RPM IP65 Lichuan AC Servo Motor Drivers Kit HIGH POWER 140N.m 22KW AC380V 44.7A 1500/2000RPM IP65
Lichuan AC Servo Motor Drivers Kit HIGH POWER 140N.m 22KW AC380V 44.7A 1500/2000RPM IP65 Lichuan AC Servo Motor Drivers Kit HIGH POWER 88N.m 18.5KW AC380V 31.6A 1500/2000RPM IP65
Lichuan AC Servo Motor Drivers Kit HIGH POWER 88N.m 18.5KW AC380V 31.6A 1500/2000RPM IP65- ຜະລິດຕະພັນໃຫມ່ທັງຫມົດ

57 Series 3 Phase Nema23 Closed Loop Stepper Motor
Hot Sale China 57 Series 3 Phase Nema23 Closed Loop Stepper Motor Free ຕົວຢ່າງຜູ້ຜະລິດແລະຜູ້ສະຫນອງ.
ສົ່ງສອບຖາມ
ລາຍລະອຽດຜະລິດຕະພັນ
LICHUAN®ຍິນດີຕ້ອນຮັບທ່ານຢ່າງອົບອຸ່ນກັບການຂາຍຍົກ 57 ຊຸດ 3 ໄລຍະ Nema23 closed loop stepper motor Series ຈາກໂຮງງານຂອງພວກເຮົາ. ຜະລິດຕະພັນຂອງພວກເຮົາໄດ້ຮັບການຢັ້ງຢືນ CE ແລະປະຈຸບັນມີສິນຄ້າຄົງຄັງຂອງໂຮງງານເປັນຈໍານວນຫຼວງຫຼາຍ. ໂຮງງານ Lichuan ມີປະສົບການການຜະລິດຫຼາຍກ່ວາ 14 ປີ .ພວກເຮົາສະຫນັບສະຫນູນ OEM & ODM, ພວກເຮົາຈະສະຫນອງການບໍລິການທີ່ດີແລະລາຄາຜ່ອນຜັນຂອງໂຮງງານ. ພວກເຮົາຍິນດີຕ້ອນຮັບຜູ້ຈັດຈໍາຫນ່າຍເພີ່ມເຕີມເຂົ້າຮ່ວມ LICHUAN.
57 ຊຸດ 3 ໄລຍະ Nema23 ວົງຈອນປິດ stepper motor, ການນໍາໃຊ້ວັດຖຸດິບຄຸນນະພາບສູງແລະມາດຕະຖານສູງເຫຼັກຊິລິຄອນສະກົດຈິດຖາວອນ, ມີ 1000-line ການເຂົ້າລະຫັດຄວາມແມ່ນຍໍາສູງ, ຢ່າງສົມບູນເອົາຊະນະບັນຫາ stepper motor ເປີດ loop, ໃນຂະນະທີ່ເສີມຂະຫຍາຍຢ່າງຫຼວງຫຼາຍ. motor ປະສິດທິພາບຄວາມໄວສູງ, ເພື່ອອໍານວຍຄວາມສະດວກໃນການຍົກລະດັບໂຄງການຂັບລົດແບບດັ້ງເດີມ, ການຫຼຸດຜ່ອນຄ່າໃຊ້ຈ່າຍເມື່ອທຽບກັບ servo motor ເພື່ອຫຼຸດຜ່ອນຫຼາຍກ່ວາ 50%. ຄວາມຍາວມໍເຕີ 77mm ~ 123mm, ຊ່ວງ torque: 1N.m ~ 3N.m, motor shaft ເສັ້ນຜ່າສູນກາງ 8mm. 57 ຊຸດ 3 ໄລຍະ Nema23 ປິດວົງຈອນ stepper motor ສາມາດຈັບຄູ່ກັບ 4 ປະເພດໄດເວີ: RS485. Canopen. Ethercat. ຄົນຂັບຄວບຄຸມກໍາມະຈອນ.
ພາຣາມິເຕີປະສິດທິພາບທາງໄຟຟ້າ
| ລາຍການ | ຂໍ້ມູນສະເພາະ |
| ຄວາມຖືກຕ້ອງຂອງມຸມ | ±5% (ຂັ້ນຕອນເຕັມ) |
| ຄວາມຕ້ານທານ ຄວາມຖືກຕ້ອງ | ±10%(20℃) |
| ຄວາມຖືກຕ້ອງຂອງ inductance | ±20%(1KHz) |
| ອຸນຫະພູມເພີ່ມຂຶ້ນ | 80℃ ສູງສຸດ (ຈັດອັນດັບ ປັດຈຸບັນ, ເປີດ 2 ເຟດ ເປີດ) |
| ອຸນຫະພູມສະພາບແວດລ້ອມ | -20℃~*50℃ |
| Insulation Resistance | 100MQmin 500VDC |
| ຄວາມແຮງຂອງ Dielectric | 500V AC 1 ນາທີ |
| ອະນຸຍາດ Radial Load | ສູງສຸດ 0.02 ມມ. (450ກຣັມ) |
| ອະນຸຍາດ Thrust Load | ສູງສຸດ 0.08 ມມ. (ໂຫຼດ 450g) |
| Radial Max Load | 75N (20mm ຈາກ ໜ້າແປນ ) |
| Shaft Max Load | 15 ນ |
| ຊຸດ | ຂັ້ນຕອນ ມຸມ(") |
ຄວາມຍາວ (ມມ) |
ຖື ແຮງບິດ (N.m) |
ໄລຍະ ປັດຈຸບັນ (A) |
ພືດຫມູນວຽນ inertia (g.cm²) |
ນ້ຳໜັກ (ກິໂລກຣາມ) |
ຄວາມລະອຽດຕົວເຂົ້າລະຫັດ (PPR) |
| LC57H355 | 1.2 | 77 | 1.0 | 3.5 | 300 | 1.0 | 1000 |
| LC57H380 | 1.2 | 102 | 2.0 | 3.5 | 500 | 1.4 | 1000 |
| LC57H3100 | 1.2 | 123 | 3.0 | 4.0 | 700 | 1.8 | 1000 |
ຂ້າງເທິງແມ່ນຜະລິດຕະພັນຕົວແທນ. ຜະລິດຕະພັນສາມາດປັບແຕ່ງໄດ້!
ຮູບຮ່າງແລະຂະຫນາດການຕິດຕັ້ງ (ຫນ່ວຍງານ: mm)
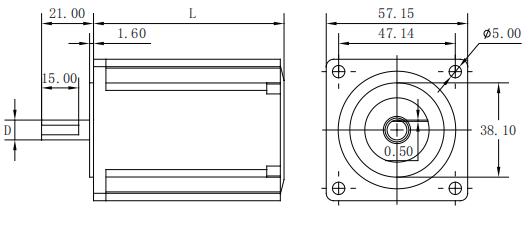
ໂຫມດ Shaft ຂອງມໍເຕີ
| ຕົວແບບ | ເພົາ ເສັ້ນຜ່າສູນກາງ(ມມ) |
ເພົາ ສ່ວນຂະຫຍາຍ(ມມ) |
ເພົາ ຄວາມຍາວ(ມມ) |
| LC57H355 | f8 | D-cut 0.5 x15 | 21 |
| LC57H380 | f8 | D-cut 0.5x15 | 21 |
| LC57H3100 | f8 | D-cut 0.5x15 | 21 |
ແຜນວາດສາຍໄຟມໍເຕີ
ສີສາຍໄຟມໍເຕີ

ຄໍານິຍາມຂອງຕົວເຂົ້າລະຫັດ ສີນຳ
| 1 | ສີເຫຼືອງ | EB+ |
| 2 | ສີຂຽວ | EB- |
| 3 | ສີດໍາ | EA+ |
| 4 | ສີຟ້າ | EA- |
| 5 | ສີແດງ | +5VCC |
| 6 | ສີຂາວ | EGND |
ບັນທຶກ
1. Phases ຈະຖືກເຊື່ອມຕໍ່ຢ່າງຖືກຕ້ອງໃນຂະນະທີ່ເຊື່ອມຕໍ່ມໍເຕີແລະໄດເວີ.
2. ການຜະລິດຄວາມຮ້ອນຂອງມໍເຕີທີ່ເຫັນໄດ້ຊັດເຈນອາດຈະເກີດຂື້ນພາຍໃຕ້ເງື່ອນໄຂການຂັບຂີ່ທີ່ແຕກຕ່າງກັນ. ອຸນຫະພູມຫນ້າດິນຂອງມໍເຕີແມ່ນອະນຸຍາດໃຫ້ເກີນ 85 ℃ໃນລະຫວ່າງການປະຕິບັດງານ.
3.Motor ຕ້ອງໄດ້ຮັບການ positioned ໂດຍການຕິດຕັ້ງ rabbet ກ່ຽວກັບການປົກຫຸ້ມຂອງ motor ດ້ານຫນ້າ, ຈະຕ້ອງຈ່າຍເອົາໃຈໃສ່ກັບຄວາມຜິດພາດການຈັບຄູ່, ແລະ concentricity ລະຫວ່າງ motor shaft ແລະການໂຫຼດຈະໄດ້ຮັບການຄວບຄຸມຢ່າງເຂັ້ມງວດ.
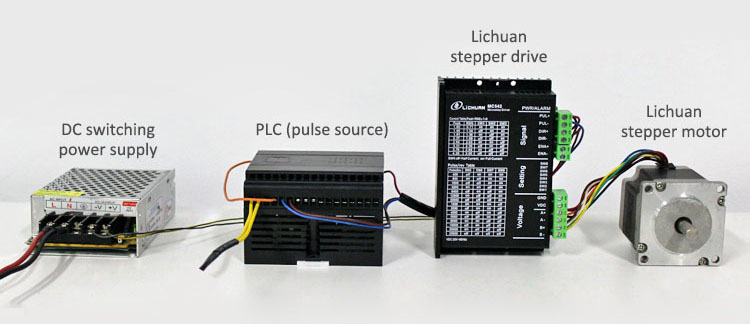
ແຜນວາດສາຍໄຟຂອງແອັບພລິເຄຊັນ
ລະບົບການຄວບຄຸມມໍເຕີ steppr ສົມບູນຄວນປະກອບມີ prduct ທີ່ສະແດງຂ້າງລຸ່ມນີ້
ການຫຸ້ມຫໍ່ຜະລິດຕະພັນ

Lichuan ໂຮງງານຜະລິດຜະລິດຕະພັນເຄື່ອງຈັກ
-

Carving Machine -

ອຸປະກອນການເຄືອບ -

ເຄື່ອງໝາຍ Fiber laster -

ເຄື່ອງ Screwing -

ເຄື່ອງທົດສອບ -

ເຄື່ອງພິມ UV
-

ເຄື່ອງ Soldering ອັດຕະໂນມັດ -

ຖືເຄື່ອງທົດສອບແຮງບິດ -

ເຄື່ອງ Screw -

ເຄື່ອງ Oscillograph
ຄໍາຮ້ອງສະຫມັກອຸດສາຫະກໍາ
-

ແຂນຫຸ່ນຍົນ -

ເຄື່ອງຕັດເລເຊີ
-

ການພິມ 3 ມິຕິ -

ເຄື່ອງ CNC -

ຢືນຢັນອັດຕະໂນມັດ -

ເຄື່ອງແກະສະຫຼັກ
Hot Tags: 57 Series 3 Phase Nema23 Closed Loop Stepper Motor, ຈີນ, ຜູ້ຜະລິດ, ສະຫນອງ, ໂຮງງານຜະລິດ, Customized, Made in China, ລາຄາຖືກ, CE, ທົນທານ, ຄຸນນະພາບ
ປະເພດທີ່ກ່ຽວຂ້ອງ
ສົ່ງສອບຖາມ
ກະລຸນາຮູ້ສຶກວ່າບໍ່ເສຍຄ່າເພື່ອໃຫ້ການສອບຖາມຂອງທ່ານໃນແບບຟອມຂ້າງລຸ່ມນີ້. ພວກເຮົາຈະຕອບກັບທ່ານໃນ 24 ຊົ່ວໂມງ.
ຜະລິດຕະພັນທີ່ກ່ຽວຂ້ອງ