- English
- Español
- Português
- русский
- Français
- 日本語
- Deutsch
- tiếng Việt
- Italiano
- Nederlands
- ภาษาไทย
- Polski
- 한국어
- Svenska
- magyar
- Malay
- বাংলা ভাষার
- Dansk
- Suomi
- हिन्दी
- Pilipino
- Türkçe
- Gaeilge
- العربية
- Indonesia
- Norsk
- تمل
- český
- ελληνικά
- український
- Javanese
- فارسی
- தமிழ்
- తెలుగు
- नेपाली
- Burmese
- български
- ລາວ
- Latine
- Қазақша
- Euskal
- Azərbaycan
- Slovenský jazyk
- Македонски
- Lietuvos
- Eesti Keel
- Română
- Slovenski
- मराठी
- Srpski језик

ບ້ານ
>
ຜະລິດຕະພັນ > Hybird Stepper Motor Driver > 2 Phase Hybrid Stepper Motor Driver > Digital 4 Phase Stepper Driver ສໍາລັບ Stepper Motors
ຜະລິດຕະພັນ
- AC Servo Motor
- DC Servo Motor
- Closed Loop Stepper Motor
- Hybird Stepper Motor
- Hybird Stepper Motor Driver
- Closed Loop Stepper Motor Driver
- AC Servo Motor Driver
- ມໍເຕີ Stepper ປະສົມປະສານ
- DC Servo Motor Driver
- Screw Motor
- RS485 ຫຼື CAN ຫຼື Ethercat Bus ປະເພດ Stepper Driver
- ເຄື່ອງຫຼຸດດາວເຄາະ
- PLC ຄວບຄຸມ
- ໜ້າຈໍສຳຜັດ HMI
- ຊຸດຄົນຂັບລົດຈັກດ້ານ motv
- ຊຸດເຄື່ອງຂັບຂີ່ມໍເຕີ້ມໍເຕີ A8 AC Servo
- ມໍເຕີ Servo ປະສົມປະສານ
ຜະລິດຕະພັນໃຫມ່
 Lichuan AC Servo Motor Drivers Kit HIGH POWER 235N.m 37KW AC380V 73A 1500/2000RPM IP65
Lichuan AC Servo Motor Drivers Kit HIGH POWER 235N.m 37KW AC380V 73A 1500/2000RPM IP65 Lichuan AC Servo Motor Drivers Kit HIGH POWER 191N.m 30KW AC380V 52A 1500/2000RPM IP65
Lichuan AC Servo Motor Drivers Kit HIGH POWER 191N.m 30KW AC380V 52A 1500/2000RPM IP65 Lichuan AC Servo Motor Drivers Kit HIGH POWER 140N.m 22KW AC380V 44.7A 1500/2000RPM IP65
Lichuan AC Servo Motor Drivers Kit HIGH POWER 140N.m 22KW AC380V 44.7A 1500/2000RPM IP65 Lichuan AC Servo Motor Drivers Kit HIGH POWER 88N.m 18.5KW AC380V 31.6A 1500/2000RPM IP65
Lichuan AC Servo Motor Drivers Kit HIGH POWER 88N.m 18.5KW AC380V 31.6A 1500/2000RPM IP65- ຜະລິດຕະພັນໃຫມ່ທັງຫມົດ

Digital 4 Phase Stepper Driver ສໍາລັບ Stepper Motors
LICHUAN® Digital 4 Phase Stepper Driver ສໍາລັບ Stepper Motors ມີລັກສະນະການອອກແບບ & ການປະຕິບັດການປະຕິບັດ & ລາຄາທີ່ແຂ່ງຂັນ, ສໍາລັບຂໍ້ມູນເພີ່ມເຕີມກ່ຽວກັບ Digital 4 Phase Stepper Driver ສໍາລັບ Stepper Motors, ກະລຸນາຕິດຕໍ່ພວກເຮົາ.
ສົ່ງສອບຖາມ
ລາຍລະອຽດຜະລິດຕະພັນ
LICHUAN®ແມ່ນ Digital 4 Phase Stepper Driver ສໍາລັບຜູ້ຜະລິດ Stepper Motors ແລະຜູ້ຈັດຈໍາຫນ່າຍໃນປະເທດຈີນຜູ້ທີ່ສາມາດຂາຍສົ່ງເຄື່ອງຂັບລົດ Stepper ດິຈິຕອນ 4 Phase ສໍາລັບ Stepper Motors. ພວກເຮົາສາມາດໃຫ້ບໍລິການແບບມືອາຊີບແລະລາຄາທີ່ດີກວ່າສໍາລັບທ່ານ. ຖ້າທ່ານສົນໃຈໃນ Digital 4 Phase Stepper Driver For Stepper Motors, ກະລຸນາຕິດຕໍ່ພວກເຮົາ. ພວກເຮົາປະຕິບັດຕາມຄຸນນະພາບຂອງການພັກຜ່ອນຮັບປະກັນວ່າລາຄາຂອງຈິດໃຈ, ການບໍລິການອຸທິດຕົນ.
ການແນະນໍາຜະລິດຕະພັນ
MC542E ເປັນລຸ້ນໃໝ່ຂອງລະບົບຂັບຖ່າຍແບບລູກປະສົມ 2 ເຟດດິຈິຕອລ ໂດຍອີງໃສ່ DSP ທີ່ມີລະບົບຄວບຄຸມຂັ້ນສູງ. microstepping arbitrary ພາຍໃນ 128 ແລະມູນຄ່າໃນປະຈຸບັນພາຍໃນການຈັດອັນດັບສາມາດກໍານົດໄດ້ຕາມຄວາມຕ້ອງການຂອງຜູ້ໃຊ້. ເນື່ອງຈາກມັນເພີ່ມການເຮັດວຽກຂອງການກໍານົດອັດຕະໂນມັດຂອງຕົວກໍານົດການ motor ພາຍໃນ, ຕົວກໍານົດການການດໍາເນີນງານທີ່ສອດຄ້ອງກັນສາມາດໄດ້ຮັບການກໍານົດສໍາລັບ motors ທີ່ແຕກຕ່າງກັນ, ເຊິ່ງເຮັດໃຫ້ motors ເຮັດວຽກໄດ້ກ້ຽງ. ດ້ວຍສຽງລົບກວນໜ້ອຍກວ່າ. ມັນເປັນການເຫມາະສົມສໍາລັບການຂັບລົດ 2 ໄລຍະ Nema17, Nema23 ປະສົມ stepper motors.
ຄຸນສົມບັດ MC542E
●ແຮງດັນການສະຫນອງ: 20 ~ 50 VDC;
●ປະຈຸບັນຜົນຜະລິດ: 1.0 A ~ 4.2 A;
● ຄວາມຖີ່ຂອງການປ້ອນຂໍ້ມູນກໍາມະຈອນ: 200KHz;
● 15 ຄວາມລະອຽດທີ່ເລືອກໄດ້ເຖິງ 25,600 ຂັ້ນຕອນ/ຮອບ;
● TTL ເຂົ້າກັນໄດ້ແລະແຍກ optically input;
●ເທກໂນໂລຍີການຄວບຄຸມປັດຈຸບັນບໍລິສຸດ sinusoidal;
● ເຕັກໂນໂລຊີປັບຕົວ;
● ຮອງຮັບໂໝດ PUL/DIR ແລະ CW/CCW;
●ແຮງດັນສັ້ນ, ແຮງດັນເກີນ, ການປົກປ້ອງເກີນກະແສໄຟຟ້າ; · ການຫຼຸດຜ່ອນການເຮັດວຽກອັດຕະໂນມັດໃນປັດຈຸບັນ
●ປະຈຸບັນຜົນຜະລິດ: 1.0 A ~ 4.2 A;
● ຄວາມຖີ່ຂອງການປ້ອນຂໍ້ມູນກໍາມະຈອນ: 200KHz;
● 15 ຄວາມລະອຽດທີ່ເລືອກໄດ້ເຖິງ 25,600 ຂັ້ນຕອນ/ຮອບ;
● TTL ເຂົ້າກັນໄດ້ແລະແຍກ optically input;
●ເທກໂນໂລຍີການຄວບຄຸມປັດຈຸບັນບໍລິສຸດ sinusoidal;
● ເຕັກໂນໂລຊີປັບຕົວ;
● ຮອງຮັບໂໝດ PUL/DIR ແລະ CW/CCW;
●ແຮງດັນສັ້ນ, ແຮງດັນເກີນ, ການປົກປ້ອງເກີນກະແສໄຟຟ້າ; · ການຫຼຸດຜ່ອນການເຮັດວຽກອັດຕະໂນມັດໃນປັດຈຸບັນ
ຕົວກໍານົດການດ້ານວິຊາການ
● ໄລຍະການປ້ອນຂໍ້ມູນແຮງດັນ: DC20V~40V
● ກະແສໄຟຟ້າສູງສຸດ: 4.2A
● ໄລຍະການແບ່ງຍ່ອຍ: 200~25600ppr
● Pulse form: ກໍາມະຈອນ + ທິດທາງ
● ຄວາມຖີ່ຂອງການຕອບໂຕ້ Impulse: 0~200KHz
● ພາຣາມິເຕີມໍເຕີຟັງຊັນປັບອັດຕະໂນມັດ
●ມີຫນ້າທີ່ປ້ອງກັນເຊັ່ນ overvoltage, overcurrent, ຕິດຕາມຄວາມຜິດພາດອອກຈາກຄວາມທົນທານ, ແລະອື່ນໆ.
● ກະແສໄຟຟ້າສູງສຸດ: 4.2A
● ໄລຍະການແບ່ງຍ່ອຍ: 200~25600ppr
● Pulse form: ກໍາມະຈອນ + ທິດທາງ
● ຄວາມຖີ່ຂອງການຕອບໂຕ້ Impulse: 0~200KHz
● ພາຣາມິເຕີມໍເຕີຟັງຊັນປັບອັດຕະໂນມັດ
●ມີຫນ້າທີ່ປ້ອງກັນເຊັ່ນ overvoltage, overcurrent, ຕິດຕາມຄວາມຜິດພາດອອກຈາກຄວາມທົນທານ, ແລະອື່ນໆ.
ຄໍາຮ້ອງສະຫມັກ
ເຫມາະສໍາລັບເຄື່ອງຈັກ stepping ທີ່ກວ້າງຂວາງ, ຈາກຂະຫນາດ NEMA 17 ຫາ 34. ມັນສາມາດນໍາໃຊ້ເຄື່ອງຈັກປະເພດຕ່າງໆ, ເຊັ່ນ: ຕາຕະລາງ X-Y, ເຄື່ອງແກະສະຫຼັກ, ເຄື່ອງປ້າຍ, ເຄື່ອງຕັດເລເຊີ, ອຸປະກອນເລືອກເອົາສະຖານທີ່, ແລະອື່ນໆ. ໂດຍສະເພາະແມ່ນປັບຕົວເຂົ້າກັບຄໍາຮ້ອງສະຫມັກທີ່ຕ້ອງການດ້ວຍສຽງຕ່ໍາ, ຄວາມຮ້ອນຕ່ໍາ, ຄວາມໄວສູງແລະຄວາມແມ່ນຍໍາສູງ.
ຕົວກໍານົດການດ້ານວິຊາການ
● ຊ່ວງແຮງດັນໄຟຟ້າ: DC20V~50V ກະແສໄຟຟ້າສູງສຸດ: 4.2A
● ໄລຍະການແບ່ງຍ່ອຍ: 200~25600ppr
● Pulse form: ກໍາມະຈອນ + ທິດທາງ
● ຄວາມຖີ່ຂອງການຕອບໂຕ້ Impulse: 0~200KHz
● ພາຣາມິເຕີມໍເຕີຟັງຊັນປັບອັດຕະໂນມັດ
●ມີຫນ້າທີ່ປ້ອງກັນເຊັ່ນ overvoltage, overcurrent, ຕິດຕາມຄວາມຜິດພາດອອກຈາກຄວາມທົນທານ, ແລະອື່ນໆ.
● ໄລຍະການແບ່ງຍ່ອຍ: 200~25600ppr
● Pulse form: ກໍາມະຈອນ + ທິດທາງ
● ຄວາມຖີ່ຂອງການຕອບໂຕ້ Impulse: 0~200KHz
● ພາຣາມິເຕີມໍເຕີຟັງຊັນປັບອັດຕະໂນມັດ
●ມີຫນ້າທີ່ປ້ອງກັນເຊັ່ນ overvoltage, overcurrent, ຕິດຕາມຄວາມຜິດພາດອອກຈາກຄວາມທົນທານ, ແລະອື່ນໆ.
ຕົວກໍານົດການດ້ານສິ່ງແວດລ້ອມ
●ອຸນຫະພູມເກັບຮັກສາ: -20 ℃ ~ 65 ℃
●ອຸນຫະພູມປະຕິບັດງານ: 0 ℃ ~ 50 ℃
● ຄວາມຊຸ່ມຊື້ນ: 40~90%RH(ບໍ່ condensing)
● ຄວາມຖີ່ຂອງການສັ່ນສະເທືອນ: ໜ້ອຍກວ່າ 0.5G(4.9m/s2)10Hz~55Hz(ບໍ່ຕໍ່ເນື່ອງ)
● ຫຼີກລ່ຽງຂີ້ຝຸ່ນ, ຮອຍເປື້ອນຂອງນໍ້າມັນ, ແກັສທີ່ກັດກ່ອນ, ສະຖານທີ່ທີ່ມີຄວາມຊຸ່ມຊື່ນຫຼາຍເກີນໄປ ແລະ ການສັ່ນສະເທືອນທີ່ແຮງເກີນໄປ, ແລະຫ້າມບໍ່ໃຫ້ແກັສໄວໄຟ ແລະ ຂີ້ຝຸ່ນທີ່ເປັນຕົວນໍາ.
●ອຸນຫະພູມປະຕິບັດງານ: 0 ℃ ~ 50 ℃
● ຄວາມຊຸ່ມຊື້ນ: 40~90%RH(ບໍ່ condensing)
● ຄວາມຖີ່ຂອງການສັ່ນສະເທືອນ: ໜ້ອຍກວ່າ 0.5G(4.9m/s2)10Hz~55Hz(ບໍ່ຕໍ່ເນື່ອງ)
● ຫຼີກລ່ຽງຂີ້ຝຸ່ນ, ຮອຍເປື້ອນຂອງນໍ້າມັນ, ແກັສທີ່ກັດກ່ອນ, ສະຖານທີ່ທີ່ມີຄວາມຊຸ່ມຊື່ນຫຼາຍເກີນໄປ ແລະ ການສັ່ນສະເທືອນທີ່ແຮງເກີນໄປ, ແລະຫ້າມບໍ່ໃຫ້ແກັສໄວໄຟ ແລະ ຂີ້ຝຸ່ນທີ່ເປັນຕົວນໍາ.
ຄຳອະທິບາຍຟັງຊັນ Drive
| ຟັງຊັນຂັບ | ຄໍາແນະນໍາ |
| Microstep ການຕັ້ງຄ່າຍ່ອຍ |
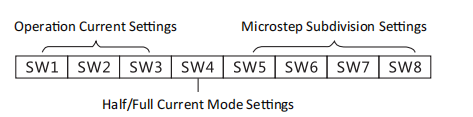
15 ພາກສ່ວນຍ່ອຍ microstep ສາມາດຖືກຕັ້ງຄ່າສໍາລັບ Driver ຜ່ານ 4 ປຸ່ມກົດ SW5 ~ SW8. ໄດເວີຈະຖືກຢຸດໃນຂະນະທີ່ຕັ້ງການແບ່ງຍ່ອຍ. ເບິ່ງຄໍາແນະນໍາກະດານໄດເວີສໍາລັບການຕັ້ງຄ່າຍ່ອຍ microstep |
| ປະຈຸບັນຜົນຜະລິດ ການຕັ້ງຄ່າ |
8 ກະແສຜົນຜະລິດສາມາດຖືກຕັ້ງຄ່າສໍາລັບ Driver ຜ່ານ 3 ປຸ່ມກົດ SW1 ~ SW3. ເບິ່ງຄໍາແນະນໍາກະດານໄດເວີສໍາລັບການຕັ້ງຄ່າປະຈຸບັນຜົນຜະລິດ. |
| ຟັງຊັນເຄິ່ງໄຫຼອັດຕະໂນມັດ | ຟັງຊັນເຄິ່ງປະຈຸບັນອັດຕະໂນມັດສາມາດຕັ້ງຄ່າໄດ້ສໍາລັບ Driver ຜ່ານສະວິດ SW4. OFF ຫມາຍຄວາມວ່າປະຈຸບັນ quiescent ຖືກຕັ້ງເປັນເຄິ່ງຫນຶ່ງຂອງ ປະຈຸບັນປະຕິບັດງານ; ON ຫມາຍຄວາມວ່າປັດຈຸບັນ quiescent ແລະ dynamic ປັດຈຸບັນແມ່ນຄືກັນ. SW4 ຈະຖືກຕັ້ງເປັນ OFF ສໍາລັບການນໍາໃຊ້ທົ່ວໄປເພື່ອຫຼຸດຜ່ອນການຜະລິດຄວາມຮ້ອນຂອງມໍເຕີແລະໄດເວີແລະປັບປຸງຄວາມຫນ້າເຊື່ອຖື. ປະມານ 0.3s ຫຼັງຈາກຢຸດລົດໄຟກໍາມະຈອນ, ປະຈຸບັນຈະ ອັດຕະໂນມັດຫຼຸດລົງ 50% (ມູນຄ່າຕົວຈິງ 55%) ແລະທາງທິດສະດີ, ການຜະລິດຄວາມຮ້ອນຈະຫຼຸດລົງ 65%. |
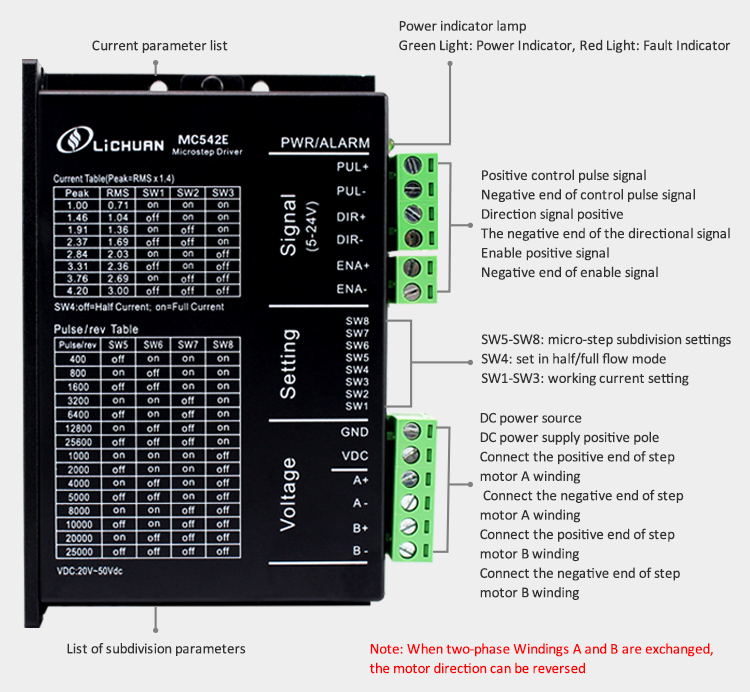
| ການໂຕ້ຕອບສັນຍານ | PUL+ ແລະ PUL- ເປັນຈຸດບວກ ແລະລົບຂອງການຄວບຄຸມສັນຍານກໍາມະຈອນ; DIR+ ແລະ DIR- ແມ່ນຈຸດເຊື່ອມຕໍ່ທາງບວກ ແລະທາງລົບຂອງສັນຍານທິດທາງ, ENA+ ແລະ ENA- ແມ່ນຈຸດເຊື່ອມຕໍ່ທາງບວກ ແລະທາງລົບຂອງສັນຍານເປີດ. |
| ການໂຕ້ຕອບມໍເຕີ | A+ ແລະ A- ເຊື່ອມຕໍ່ກັບ terminals ໃນທາງບວກແລະທາງລົບຂອງໄລຍະ A winding ຂອງ stepper motor; B+ ແລະ B- ເຊື່ອມຕໍ່ກັບ terminals ບວກແລະລົບ, ເມື່ອ A ແລະ B ໄລຍະ windings ຖືກສະຫຼັບ, ທິດທາງ motor ຈະຖືກປີ້ນກັບກັນ; |
| ຕົວເຊື່ອມຕໍ່ພະລັງງານ | ການສະຫນອງພະລັງງານ DC, ໄລຍະແຮງດັນ input: 20V ~ 50VDC, ແຮງດັນການດໍາເນີນງານ 36VDC ແມ່ນແນະນໍາ, ການສະຫນອງພະລັງງານຈະສູງກວ່າ 100W. |
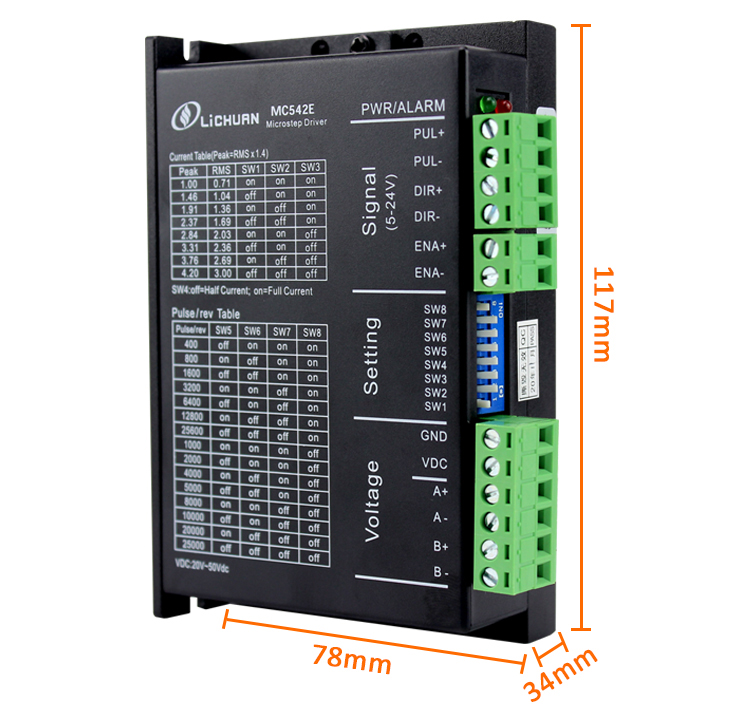
| ແສງຕົວຊີ້ວັດ | ມີໄຟຊີ້ບອກສີຂຽວ 1 ອັນ ແລະໄຟຊີ້ບອກສີແດງ 1 ອັນຢູ່ Driver. ສີຂຽວແມ່ນໄຟຊີ້ບອກພະລັງງານ, ມັນຈະສະຫວ່າງໃນເວລາທີ່ Driver ເຊື່ອມຕໍ່ກັບການສະຫນອງພະລັງງານ; ສີແດງແມ່ນໄຟຊີ້ບອກຄວາມລົ້ມເຫຼວ, ມັນຈະສະຫວ່າງໃນເວລາທີ່ແຮງດັນເກີນຫຼືຄວາມລົ້ມເຫຼວຂອງປະຈຸບັນເກີດຂຶ້ນ. ໄຟຕົວຊີ້ວັດສີແດງຈະຖືກປິດຫຼັງຈາກຄວາມລົ້ມເຫຼວຖືກລົບລ້າງ. ຄວາມລົ້ມເຫຼວຂອງ Driver ສາມາດຖືກລົບລ້າງພຽງແຕ່ໂດຍການເຊື່ອມຕໍ່ກັບການສະຫນອງພະລັງງານແລະການນໍາໃຊ້ຄືນໃຫມ່. |
| ການຕິດຕັ້ງ ບັນທຶກ |
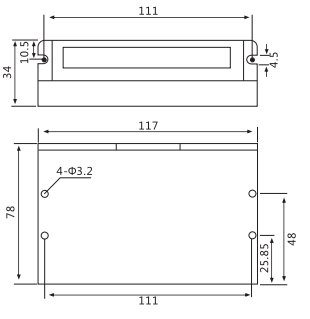
ຂະຫນາດຂອງໄດເວີ: 117x78x34mm, pitch ການຕິດຕັ້ງຂອງຮູ: 111mm. ການຕິດຕັ້ງທັງແນວນອນແລະແນວຕັ້ງສາມາດເລືອກໄດ້ (ການຕິດຕັ້ງແນວຕັ້ງແມ່ນແນະນໍາ). ໄດເວີຈະຖືກຕິດຕັ້ງຢ່າງໃກ້ຊິດກັບຕູ້ໂລຫະສໍາລັບການກະຈາຍຄວາມຮ້ອນ. |
ການຕັ້ງຄ່າພາລາມິເຕີ
ຄວາມແມ່ນຍໍາຂອງ subdivision, dynamic ແລະເຄິ່ງຫນຶ່ງ / ເຕັມປະຈຸບັນສາມາດຖືກກໍານົດສໍາລັບ MC542E Driver ຜ່ານ 8-bit dial switch ດັ່ງຕໍ່ໄປນີ້:
ການຕັ້ງຄ່າປະຈຸບັນເຮັດວຽກ
| Output ສູງສຸດ ປະຈຸບັນ | ຜົນຜະລິດສະເລ່ຍປັດຈຸບັນ | SW1 | SW2 | SW3 |
| 1.0A | 0.71A | ສຸດ | ສຸດ | ສຸດ |
| 1.46A | 1.04A | ປິດ | ສຸດ | ສຸດ |
| 1.91A | 1.36A | ສຸດ | ປິດ | ສຸດ |
| 2.37A | 1.69A | ປິດ | ປິດ | ສຸດ |
| 2.84A | 2.03A | ສຸດ | ສຸດ | ປິດ |
| 3.31A | 2.36A | ປິດ | ສຸດ | ປິດ |
| 3.76A | 2.69A | ສຸດ | ປິດ | ປິດ |
| 4.2A | 3.0A | ປິດ | ປິດ | ປິດ |
ຂະໜາດການຕິດຕັ້ງ (ຫົວໜ່ວຍ: mm)
ການຕັ້ງຄ່າຍ່ອຍຂອງ Microstep
| ຂັ້ນຕອນ/ການປະຕິວັດ | SW5 | SW6 | SW7 | SW8 |
| ຄ່າເລີ່ມຕົ້ນ | ສຸດ | ສຸດ | ສຸດ | ສຸດ |
| 400 | ປິດ | ສຸດ | ສຸດ | ສຸດ |
| 800 | ສຸດ | ປິດ | ສຸດ | ສຸດ |
| 1600 | ປິດ | ປິດ | ສຸດ | ສຸດ |
| 3200 | ສຸດ | ສຸດ | ປິດ | ສຸດ |
| 6400 | ປິດ | ສຸດ | ປິດ | ສຸດ |
| 12800 | ສຸດ | ປິດ | ປິດ | ສຸດ |
| 25600 | ປິດ | ປິດ | ປິດ | ສຸດ |
| 1000 | ສຸດ | ສຸດ | ສຸດ | ປິດ |
| 2000 | ປິດ | ສຸດ | ສຸດ | ປິດ |
| 4000 | ສຸດ | ປິດ | ສຸດ | ປິດ |
| 5000 | ປິດ | ປິດ | ສຸດ | ປິດ |
| 8000 | ສຸດ | ສຸດ | ປິດ | ປິດ |
| 10000 | ປິດ | ສຸດ | ປິດ | ປິດ |
| 20000 | ສຸດ | ປິດ | ປິດ | ປິດ |
| 25000 | ປິດ | ປິດ | ປິດ | ປິດ |
Lichuan ໂຮງງານຜະລິດຜະລິດຕະພັນເຄື່ອງຈັກ
-

ເຄື່ອງແກະສະຫຼັກ -

ອຸປະກອນການເຄືອບ -

ເຄື່ອງໝາຍ Fiber laster -

ເຄື່ອງ Screwing -

ເຄື່ອງທົດສອບ -

ເຄື່ອງພິມ UV
-

ເຄື່ອງ Soldering ອັດຕະໂນມັດ -

ຖືເຄື່ອງທົດສອບແຮງບິດ -

ເຄື່ອງ Screw -

ເຄື່ອງ Oscillograph
ຄໍາຮ້ອງສະຫມັກອຸດສາຫະກໍາ
-

ແຂນຫຸ່ນຍົນ -

ເຄື່ອງຕັດເລເຊີ
-

ການພິມ 3 ມິຕິ -

ເຄື່ອງ CNC -

ຢືນຢັນອັດຕະໂນມັດ -

ເຄື່ອງແກະສະຫຼັກ
Hot Tags: Digital 4 Phase Stepper Driver ສໍາລັບ Stepper Motors, ຈີນ, ຜູ້ຜະລິດ, ຜູ້ຜະລິດ, ໂຮງງານຜະລິດ, Customized, Made in China, ລາຄາຖືກ, CE, ທົນທານ, ຄຸນະພາບ
ປະເພດທີ່ກ່ຽວຂ້ອງ
2 Phase Hybrid Stepper Motor Driver
3 Phase Hybrid Stepper Motor Driver
2 Phase Stepper Driver Mini
2 Phase I/O Control Stepper Driver
ສົ່ງສອບຖາມ
ກະລຸນາຮູ້ສຶກວ່າບໍ່ເສຍຄ່າເພື່ອໃຫ້ການສອບຖາມຂອງທ່ານໃນແບບຟອມຂ້າງລຸ່ມນີ້. ພວກເຮົາຈະຕອບກັບທ່ານໃນ 24 ຊົ່ວໂມງ.