- English
- Español
- Português
- русский
- Français
- 日本語
- Deutsch
- tiếng Việt
- Italiano
- Nederlands
- ภาษาไทย
- Polski
- 한국어
- Svenska
- magyar
- Malay
- বাংলা ভাষার
- Dansk
- Suomi
- हिन्दी
- Pilipino
- Türkçe
- Gaeilge
- العربية
- Indonesia
- Norsk
- تمل
- český
- ελληνικά
- український
- Javanese
- فارسی
- தமிழ்
- తెలుగు
- नेपाली
- Burmese
- български
- ລາວ
- Latine
- Қазақша
- Euskal
- Azərbaycan
- Slovenský jazyk
- Македонски
- Lietuvos
- Eesti Keel
- Română
- Slovenski
- मराठी
- Srpski језик

ບົດຂຽນທີ່ເຂົ້າໃຈຄວາມແຕກຕ່າງລະຫວ່າງຜູ້ຂັບຂີ່ລະຫວ່າງ Stepper Motors ແລະ Servos ແລະ Servo Motors
I. ຄວາມແຕກຕ່າງລະຫວ່າງຜູ້ຂັບຂີ່ຂັ້ນໄດແລະ servos ແລະ servo motors
ເຄື່ອງຈັກ stepper: ແມ່ນສັນຍານກໍາມະຈອນໄຟຟ້າເຂົ້າໄປໃນການຍ້າຍໄປເປັນລ່ຽມຫລືການຍ້າຍສາຍຂອງສາຍພັນທີ່ມີການຄວບຄຸມ. ພຽງແຕ່ໃສ່, ມັນຂື້ນກັບສັນຍານກໍາມະຈອນໄຟຟ້າເພື່ອຄວບຄຸມມຸມແລະຈໍານວນລ້ຽວ. ສະນັ້ນລາວພຽງແຕ່ອີງໃສ່ສັນຍານກໍາມະຈອນເພື່ອກໍານົດການຫມູນວຽນເທົ່າໃດ. ເນື່ອງຈາກວ່າບໍ່ມີເຊັນເຊີ, ມຸມຢຸດອາດຈະຫັນເຫ. ເຖິງຢ່າງໃດກໍ່ຕາມ, ສັນຍານກໍາມະຈອນກໍາມະຈອນຈະຫນ້ອຍທີ່ສຸດ.
ເຄື່ອງຈັກເຊດ: ອີງໃສ່ວົງຈອນຄວບຄຸມ servo ເພື່ອຄວບຄຸມຄວາມໄວຂອງມໍເຕີ, ຜ່ານແກັບເພື່ອຄວບຄຸມຕໍາແຫນ່ງຫມູນວຽນ. ສະນັ້ນການຄວບຄຸມຕໍາແຫນ່ງແມ່ນຊັດເຈນກວ່າ. ແລະຄວາມໄວຫມູນວຽນກໍ່ແມ່ນຕົວປ່ຽນແປງ.
Servo (servenicic servo): ສ່ວນປະກອບຕົ້ນຕໍຂອງ servo ແມ່ນມໍເຕີ servo. ມັນປະກອບດ້ວຍຊຸດເຄື່ອງຄວບຄຸມລົດຍົນ Servo + ຊຸດຫຼຸດຜ່ອນ. ໂອ້ຍ, motor servo ບໍ່ໄດ້ມີການຫຼຸດຜ່ອນຊຸດເກຍ. ແລະ servo ມີຊຸດເຄື່ອງມືຫຼຸດຜ່ອນ.
ໃນກໍລະນີຂອງ Servo ຈໍາກັດ servo, ມັນອາໄສຢູ່ໃນ potentiometer ພາຍໃຕ້ການຊີ້ນໍາການຊີ້ນໍາຂອງແຂນຂອງ rudder. ການຄວບຄຸມສັນຍານ servo ແມ່ນຄວາມກວ້າງຂອງກໍາມະຈອນ (PWM) ທີ່ມີສັນຍານ, ບ່ອນທີ່ microcontroller ສາມາດສ້າງສັນຍານນີ້ໄດ້ງ່າຍ.
II. ຫຼັກການພື້ນຖານກ່ຽວກັບມໍເຕີ
ເຮັດແນວໃດມັນເຮັດວຽກ:
ໂດຍປົກກະຕິແລ້ວລົດຈັກຂອງມໍເຕີແມ່ນແມ່ເຫຼັກຖາວອນ, ແລະໃນເວລາທີ່ກະແສໄຟຟ້າກະແສໄຟຟ້າ, ຄວາມຕື່ນເຕັ້ນຂອງແມ່ເຫຼັກ stator. ສະຫນາມແມ່ເຫຼັກນີ້ຈະຂັບລົດ rotor ຫມູນວຽນໂດຍມຸມ, ເພື່ອໃຫ້ທິດທາງຂອງທົ່ງແມ່ເຫຼັກຂອງ Rotor ຈະຄືກັນກັບທິດທາງຂອງສະຫນາມແມ່ເຫຼັກຂອງ stator. ໃນເວລາທີ່ສະຫນາມ vector ແມ່ເຫຼັກຂອງ stator ຫມຸນໂດຍມຸມ. rotor ຍັງຫມູນໂດຍມຸມກັບສະຫນາມແມ່ເຫຼັກນີ້. ສໍາລັບກໍາມະຈອນໄຟຟ້າເຂົ້າປະກອບແຕ່ລະ, ມໍເຕີຫມູນວຽນຫນຶ່ງເປັນສີເປັນລ່ຽມໄປຂ້າງຫນ້າ. ການຍ້າຍຖິ່ນຖານຂອງມັນຜົນຜະລິດຂອງມັນແມ່ນອັດຕາສ່ວນກັບຈໍານວນຖົ່ວເຫຼືອງ, ແລະຄວາມໄວຫມູນວຽນຂອງມັນແມ່ນສັດສ່ວນຂອງຄວາມຖີ່ຂອງກໍາມະຈອນ. ໂດຍການປ່ຽນແປງຄໍາສັ່ງທີ່ມີລົມພັດແຮງ, ມໍເຕີປີ້ນກັບກັນ. ສະນັ້ນ, ຈໍານວນແລະຄວາມຖີ່ຂອງການກໍາມະການແລະຄວາມຖີ່ຂອງການເຮັດໃຫ້ມີຄວາມເຂັ້ມແຂງຂອງແຕ່ລະໄລຍະຂອງແຕ່ລະໄລຍະສາມາດຄວບຄຸມໄດ້ເພື່ອຄວບຄຸມການຫມູນວຽນຂອງລົດຈັກ.
ຫຼັກການຂອງການຜະລິດຄວາມຮ້ອນ:
ປົກກະຕິແລ້ວເຫັນເຄື່ອງຈັກທຸກຊະນິດ, ພາຍໃນແມ່ນທາດເຫຼັກທີ່ເປັນທາດເຫຼັກແລະສາຍແອວ. Winding ຕ້ານ, ພະລັງງານຈະຜະລິດຂະຫນາດແລະການຕໍ່ຕ້ານການສູນເສຍແລະປະຈຸບັນແມ່ນມັກຈະຖືກສູນເສຍຈາກທອງແດງ, ຖ້າວ່າກະແສໄຟຟ້າບໍ່ແມ່ນຄື້ນ DC ຫຼື Sine ກໍ່ຍັງຈະໄດ້ຮັບການສູນເສຍຄວາມກົມກຽວ; ຫຼັກມີຜົນກະທົບຂອງປະຈຸບັນ, ໃນສະຫນາມແມ່ເຫຼັກສະບັບຫນຶ່ງຈະເຮັດໃຫ້ວັດສະດຸ, ຂະຫນາດ, ແຮງດັນ, ແຮງດັນ, ເຊິ່ງເອີ້ນວ່າການສູນເສຍທາດເຫຼັກ. ການສູນເສຍທອງແດງແລະການສູນເສຍທາດເຫຼັກຈະໄດ້ຮັບການສະແດງອອກໃນຮູບແບບຂອງການຜະລິດຄວາມຮ້ອນ, ດັ່ງນັ້ນຜົນກະທົບຕໍ່ປະສິດທິຜົນຂອງມໍເຕີ. ການແຂ່ງຂັນມໍເຕີ້ໂດຍທົ່ວໄປດໍາເນີນການໃຫ້ຄວາມຖືກຕ້ອງແລະສ່ວນປະກອບທີ່ມີປະສິດຕິພາບສູງ, ແລະການປ່ຽນແປງຂອງປະຈຸບັນມີສະຖານະການທີ່ຮ້ອນແຮງ, ແລະສະຖານະການກໍ່ຍິ່ງຮ້າຍແຮງກ່ວານັກແລ່ນທົ່ວໄປ.
III. ການກໍ່ສ້າງ Rudder
servo ສ່ວນໃຫຍ່ແມ່ນປະກອບດ້ວຍທີ່ຢູ່ອາໃສ, ກະດານວົງຈອນ, ເຄື່ອງຈັກຂັບ, ເຄື່ອງຈັກໃນເຄື່ອງເກັງແລະອົງປະກອບການຊອກຄົ້ນຫາ. ຫຼັກການໃນການເຮັດວຽກຂອງມັນແມ່ນວ່າຜູ້ຮັບສົ່ງສັນຍານໃຫ້ servo, ແລະໃນເວລາດຽວກັນແມ່ນໄດ້ຮັບສັນຍານກັບຄືນສູ່ການກໍານົດວ່າມັນໄດ້ມາຮອດຕໍາແຫນ່ງຫຼືບໍ່. ເຄື່ອງກວດຈັບຕໍາແຫນ່ງຕົວຈິງແມ່ນຕົວຈິງ. ໃນເວລາທີ່ servo ຫມຸນ, ມູນຄ່າ resistor ຈະມີການປ່ຽນແປງຕາມຄວາມເຫມາະສົມ, ແລະມຸມຂອງພືດຫມູນວຽນສາມາດເປັນທີ່ຮູ້ຈັກໂດຍການກວດພົບມູນຄ່າ resistor ໄດ້. ລົດຍົນທົ່ວໄປ Servo ແມ່ນສາຍທອງແດງທີ່ເຮັດດ້ວຍທອງແດງທີ່ຖືກມັດໄວ້ຮອບໆ, ເມື່ອກະແສໄຟຟ້າຈະສ້າງສະຫນາມແມ່ເຫຼັກ, ເຊິ່ງເຮັດໃຫ້ເກີດຜົນບັງຄັບໃຊ້ຂອງການຫມູນວຽນ. ອີງຕາມຟີຊິກສາດ, ຊ່ວງເວລາຂອງຄວາມບໍ່ມີປະໂຫຍດຂອງວັດຖຸແມ່ນອັດຕາສ່ວນໂດຍກົງກັບມວນສານຂອງມັນ, ສະນັ້ນຍິ່ງໃຫຍ່ຂອງວັດຖຸທີ່ຕ້ອງໄດ້ຫມູນວຽນ, ກໍາລັງທີ່ຕ້ອງການຫຼາຍກວ່າເກົ່າ. ເພື່ອໃຫ້ໄດ້ຮັບຄວາມໄວໃນການຫມູນວຽນໄວແລະການບໍລິໂພກດ້ວຍຮູເຫລັກທີ່ມີຮູອ່ອນໆ, ປະກອບເປັນເສົານ້ໍາທີ່ມີນ້ໍາຫນັກຫຼາຍ.
ເພື່ອໃຫ້ເຫມາະສົມກັບສະພາບແວດລ້ອມທີ່ມີການເຮັດວຽກທີ່ແຕກຕ່າງກັນ, ມີ servos ທີ່ມີການອອກແບບກັນນ້ໍາແລະຝຸ່ນ; ແລະໃນການຕອບສະຫນອງກັບຄວາມຕ້ອງການດ້ານການໂຫຼດທີ່ແຕກຕ່າງກັນ, ມີເຄື່ອງມືພາດສະຕິກແລະໂລຫະສໍາລັບເຄື່ອງມືທີ່ມີຄວາມໄວສູງແລະມີຄວາມໄວສູງທີ່ບໍ່ໄດ້ຮັບຜົນປະໂຫຍດຈາກການໂຫຼດຫຼາຍເກີນໄປ. servos ຊັ້ນຊັ້ນສູງຈະໄດ້ຮັບການຕິດຕັ້ງບານບານເພື່ອເຮັດໃຫ້ການຫມູນວຽນໄວແລະຖືກຕ້ອງກວ່າ. ມີຄວາມແຕກຕ່າງກັນລະຫວ່າງການເກິດບານ 1 ຫນ່ວຍແລະລູກປືນສອງຫນ່ວຍ, ແນ່ນອນວ່າລູກບານສອງຫນ່ວຍກໍ່ດີກວ່າ. Servos fet ໃຫມ່ສ່ວນໃຫຍ່ແມ່ນໃຊ້ fet (Effect Effect Transistor), ເຊິ່ງມີປະໂຫຍດຈາກການຕໍ່ຕ້ານພາຍໃນທີ່ຕໍ່າແລະດັ່ງນັ້ນການສູນເສຍໃນປະຈຸບັນຫນ້ອຍກວ່າ transistors ປົກກະຕິ.
iv. ຫຼັກການເຊີວິວຂອງການປະຕິບັດງານ
ຈາກ PWM ANDS ເຂົ້າໄປໃນວົງຈອນພາຍໃນເພື່ອສ້າງແຮງດັນຄວາມສະດວກສະບາຍ, ໂດຍທົ່ວໄປໃນການຫຼຸດຜ່ອນ potentiometer ໃນການຢຸດ, ມໍເຕີຢຸດ, ເພື່ອໃຫ້ໄດ້ຜົນຂອງ Servo.
ພິທີການສໍາລັບ servo pwms ແມ່ນຄືກັນ, ແຕ່ວ່າ servos ລ້າສຸດທີ່ຈະປະກົດຕົວອາດຈະແຕກຕ່າງກັນ.
ອະນຸສັນຍາໂດຍທົ່ວໄປແມ່ນ: ຄວາມກວ້າງໃນລະດັບສູງໃນ 0.5ms ~ 2.5ms ໃນການຄວບຄຸມ servo ເພື່ອເຮັດໃຫ້ servel ທີ່ແຕກຕ່າງກັນ.
V. ວິທີການ servo motors ເຮັດວຽກ
ຕົວເລກຂ້າງລຸ່ມນີ້ສະແດງໃຫ້ເຫັນວົງຈອນຄວບຄຸມ servo ທີ່ເຮັດດ້ວຍເຄື່ອງຫມາຍການປະຕິບັດງານພະລັງງານ LM675, ແລະມໍເຕີແມ່ນມໍເຕີ DC servo. ດັ່ງທີ່ເຫັນໄດ້ຈາກຮູບ, ພະລັງງານ amplifier amp675 ແມ່ນເພີ່ມຂື້ນຂອງ amp675 amp675 LM675 ຜ່ານ RP 1, ແລະແຮງດັນໄຟຟ້າຂອງ LM675. ມໍເຕີໄດ້ຖືກຕິດຕັ້ງດ້ວຍເຄື່ອງວັດແທກຄວາມໄວສໍາລັບການກວດພົບເວລາຈິງຂອງຄວາມໄວຂອງມໍເຕີ. ໃນຄວາມເປັນຈິງ, ການຜະລິດສັນຍານຄວາມໄວແມ່ນປະເພດຂອງເຄື່ອງປັ່ນໄຟ, ແລະແຮງດັນໄຟຟ້າຂອງມັນແມ່ນອັດຕາສ່ວນກັບຄວາມໄວຫມູນວຽນ. ຜົນໄດ້ຮັບແຮງດັນຈາກເຄື່ອງມືວັດແທກຄວາມໄວ G ແມ່ນ Fed ກັບຄືນໄປບ່ອນເຂົ້າໄປໃນການເຂົ້າເຖິງຂອງເຄື່ອງຂະຫຍາຍການປະຕິບັດງານເປັນສັນຍານຄວາມໄວຫຼັງຈາກວົງຈອນ divetage. ມູນຄ່າແຮງດັນທີ່ກໍານົດໂດຍຄວາມໄວທີ່ Potentiometer Potentiometer RP1 ແມ່ນຖືກເພີ່ມເຂົ້າໃນການປ້ອນ englifier ໃນໄລຍະຫຼັງຈາກ R1.r2, ເຊິ່ງທຽບເທົ່າກັບ voltage ອ້າງອີງ.
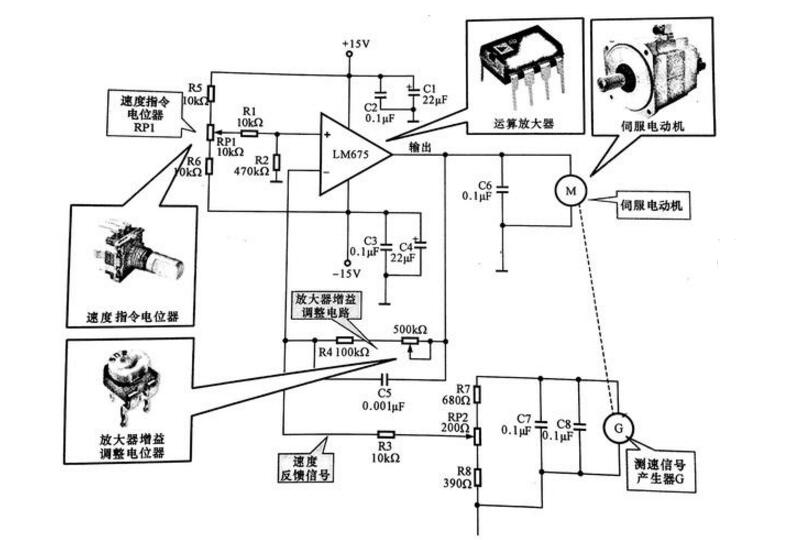
ຄວບຄຸມ schematic ຂອງ motor servo
Servomotor: ຊີ້ບອກໂດຍຈົດຫມາຍ M ສໍາລັບ servomotor, ມັນແມ່ນແຫຼ່ງຂອງພະລັງງານສໍາລັບລະບົບຂັບ. ເຄື່ອງຂະຫຍາຍສຽງໃນການດໍາເນີນງານ: ຫມາຍໂດຍຊື່ວົງຈອນ, i.e.
ຄວາມໄວ Command Command Postentiometer RP1: ກໍານົດແຮງດັນໄຟຟ້າເອກະສານຂອງເຄື່ອງຂະຫຍາຍສຽງໃນການປະຕິບັດງານໃນວົງຈອນ, i.e .e. ການຕັ້ງຄວາມໄວ. ເຄື່ອງຂະຫຍາຍສຽງການປັບຕົວ Potentiometment Potentiometer RP2: ໃຊ້ໃນວົງຈອນເພື່ອປັບລະດັບຄວາມຍືດເຍື້ອແລະຂະຫນາດຂອງສັນຍານຄວາມໄວຕາມລໍາດັບ.
ໃນເວລາທີ່ການໂຫຼດຂອງມໍເຕີ, ແຮງດັນໄຟຟ້າໄດ້ຮັບຄວາມໄວສູງ, ເຄື່ອງຂະຫຍາຍການປະຕິບັດງານເພີ່ມຂື້ນ. ກົງກັນຂ້າມ, ໃນເວລາທີ່ການໂຫຼດຈະກາຍເປັນຂະຫນາດນ້ອຍລົງແລະຄວາມໄວຂອງເຄື່ອງສໍາອາງທີ່ມີຄວາມໄວສູງ,